Hi Richard,
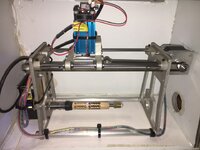
Setting up the rotary was not to difficult, I changed the Y axis to a simply by fitting a chuck directly onto the stepper motor and left X as it is.
In the software I had to do a hit and miss with the feed of the Y axis.
I based this o a 16mm diameter pen as average this gives me the possibility to use pics up to about 35 mm wide on the circumference of the blank.
One you get into GRBL you can set it up for this.
Here is the standard GRBL setup.
$0=10 (step pulse, usec)
$1=25 (step idle delay, msec)
$2=0 (step port invert mask:00000000)
$3=6 (dir port invert mask:00000110)
$4=0 (step enable invert, bool)
$5=0 (limit pins invert, bool)
$6=0 (probe pin invert, bool)
$10=3 (status report mask:00000011)
$11=0.020 (junction deviation, mm)
$12=0.002 (arc tolerance, mm)
$13=0 (report inches, bool)
$20=0 (soft limits, bool)
$21=0 (hard limits, bool)
$22=0 (homing cycle, bool)
$23=1 (homing dir invert mask:00000001)
$24=50.000 (homing feed, mm/min)
$25=635.000 (homing seek, mm/min)
$26=250 (homing debounce, msec)
$27=1.000 (homing pull-off, mm)
$100=314.961 (x, step/mm)
$101=314.961 (y, step/mm)
$102=314.961 (z, step/mm)
$110=635.000 (x max rate, mm/min)
$111=635.000 (y max rate, mm/min)
$112=635.000 (z max rate, mm/min)
$120=50.000 (x accel, mm/sec^2)
$121=50.000 (y accel, mm/sec^2)
$122=50.000 (z accel, mm/sec^2)
$130=225.000 (x max travel, mm)
$131=125.000 (y max travel, mm)
$132=170.000 (z max travel, mm)
If you look at $101 this is the travel of the Y axis per mm 16 mm toothed gear with belt.
I changed this to about 80 and I got a good result.
As I said it is trial and error, time consuming but not difficult there being so much info available on the internet.
I hope this is a help for you
Cheers from Germany
Andrew